robotchomoinguoi
Thành viên
- Tham gia
- 10/10/2017
- Bài viết
- 2
Điều khiển động cơ bước 5V- Giới thiệu
Bài viết nguồn xem tại: laptrinhdieukhien.com
Điều khiển động cơ bước 5V là bài học thứ 8 trong chuỗi bài tự học arduino. Ở bài học này, chúng ta sẽ cùng làm quen với loại động cơ bước đơn giản 28BYJ-48 và module ULN2003.

Loại động cơ bước được sử dụng trong bài học này là loại động cơ bước 4 pha (2 pha được chia đôi ở mỗi pha ngay tại vị trí giữa) (gồm 5 dây). Một bước động cơ xoay 5.625 độ, để quay hết một vòng là 64 bước
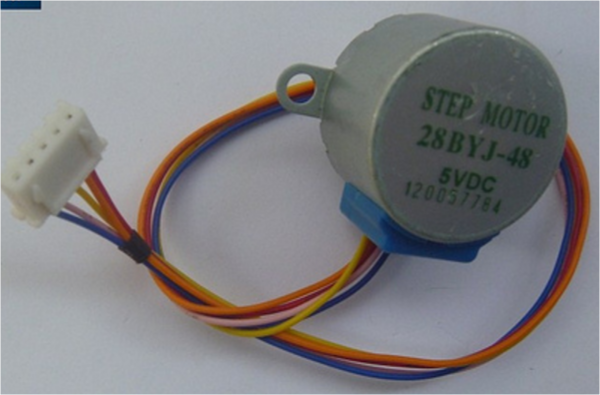
Thông số kỹ thuật
Điện thế: 5V
Số pha: 4
Tỉ lệ bánh răng: *64
Một bước tương đương 5.625 độ
Tần số: 100Hz
Điện trở trong 50 Ω±7%(25℃)
Linh kiện chuẩn bị
Arduino Uno R3
Dây bus đực cái
Động cơ bước 5V và module ULN2003
Hướng dẫn chi tiết
Để điều khiển động cơ bước 5V, ở video hướng dẫn sau đây chúng ta sẽ sử dụng thư viện Stepper.h được tích hợp sẵn trong arduino IDE để điều khiển. Các bạn chú ý theo dõi các bước thực hiện nhé

Code mẫu arduino
Các bạn có thể sử dụng code mẫu này để nạp cho arduino nhé.
/*
Stepper Motor Control – one revolution
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 – 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(500);
}
Bài viết nguồn xem tại: laptrinhdieukhien.com
Điều khiển động cơ bước 5V là bài học thứ 8 trong chuỗi bài tự học arduino. Ở bài học này, chúng ta sẽ cùng làm quen với loại động cơ bước đơn giản 28BYJ-48 và module ULN2003.
Loại động cơ bước được sử dụng trong bài học này là loại động cơ bước 4 pha (2 pha được chia đôi ở mỗi pha ngay tại vị trí giữa) (gồm 5 dây). Một bước động cơ xoay 5.625 độ, để quay hết một vòng là 64 bước
Thông số kỹ thuật
Điện thế: 5V
Số pha: 4
Tỉ lệ bánh răng: *64
Một bước tương đương 5.625 độ
Tần số: 100Hz
Điện trở trong 50 Ω±7%(25℃)
Linh kiện chuẩn bị
Arduino Uno R3
Dây bus đực cái
Động cơ bước 5V và module ULN2003
Hướng dẫn chi tiết
Để điều khiển động cơ bước 5V, ở video hướng dẫn sau đây chúng ta sẽ sử dụng thư viện Stepper.h được tích hợp sẵn trong arduino IDE để điều khiển. Các bạn chú ý theo dõi các bước thực hiện nhé
Code mẫu arduino
Các bạn có thể sử dụng code mẫu này để nạp cho arduino nhé.
/*
Stepper Motor Control – one revolution
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 – 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(500);
}